Skalary i wektory w statyce
Spis treści
W przeprowadzanych obliczeniach w budownictwie korzysta się z różnych rodzajów wartości, są to między innymi siła, pęd, temperatura, gęstość, masa, ciśnienie i wiele innych, wszystkie te pojęcia sprowadzają się do dwóch pojęć z tytułu tego materiału. Skalary i wektory chociaż nie występują stricte pod tymi nazwami w dalszych kursach, używa się ich nagminnie pod postaciami sił, naprężeń, obciążeń etc. Dlatego tak ważne jest aby one również zostały opisane we wstępie do pozostałych kursów.
Skalary i wektory
W fizyce najogólniej możemy rozróżnić dwa rodzaje wielkości fizycznych są nimi wielkości skalarne oraz wielkości wektorowe.
Skalar
Skalary opisują wartości bezkierunkowe jakimi jest czas, temperatura, gęstość, pole elektromagnetyczne oraz grawitacyjne, długość czy pole powierzchni. Oznaczane są za pomocą zwykłych liter pisanych kursywą. Przykłady wartości skalarnych przedstawiają się następująco.

Skalary składają się jedynie z wartości i niekiedy z punktu przyłożenia.
Wektor
Wektory opisują wartości posiadające kierunek czyli siłę, prędkość, przyspieszenie, pęd. Oznacza się je na dwa sposoby jako literę ze strzałką lub jako literę pisaną wielką listerą i z pogrubioną czcionką F.
Wektor, w przeciwieństwie do skalara jest bardziej złożony i opisuje go więcej elementów. Wektory to wielkości, które posiadają kierunek, zwrot, punkt przyłożenia oraz wartość (moduł).

Kierunek wektora to prosta poprowadzona przez jego początek oraz koniec.
Zwrot wektora określa początek i koniec wektora.
Punkt przyłożenia (zaczepienia) wektora to obiekt do którego odnosi się nasz wektor, dobrym przykładem jest obciążenie przyłożone do rygla. Jeśli siła znajduje się po środku rygla wtedy mówimy, że jest ona przyłożona w środku rygla (belki).
Wartość wektora (moduł) mówi nam o wielkości, która określa ten wektor. Najlepiej zobrazuje to przykład belki obciążonej dwiema siłami przedstawionymi za pomocą wektorów.
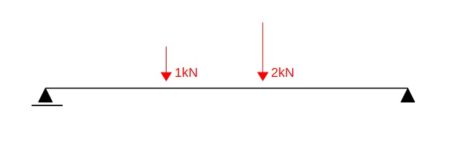
Zachowując skalę wielkości widzimy, że moduł wektora siły 1,00 kN jest dwukrotnie krótszy niż moduł wektora siły 2,00 kN.
Przedstawienie wektorów
Wiemy już, że wektory są o wiele bardziej złożone niż skalary, a co za tym idzie o wiele bardziej pomocne w statyce i mechanice. Przyjrzyjmy się teraz dwóm sposobom przedstawiania wektorów. Pierwszy z nich to ujęcie graficzne przedstawiające wektor jako strzałkę znajdującą się na płaszczyźnie lub w przestrzeni, a drugi to ujęcie analityczne przedstawiające układ dwóch liczb (współrzędnych) na płaszczyźnie lub trzech liczb w przestrzeni.
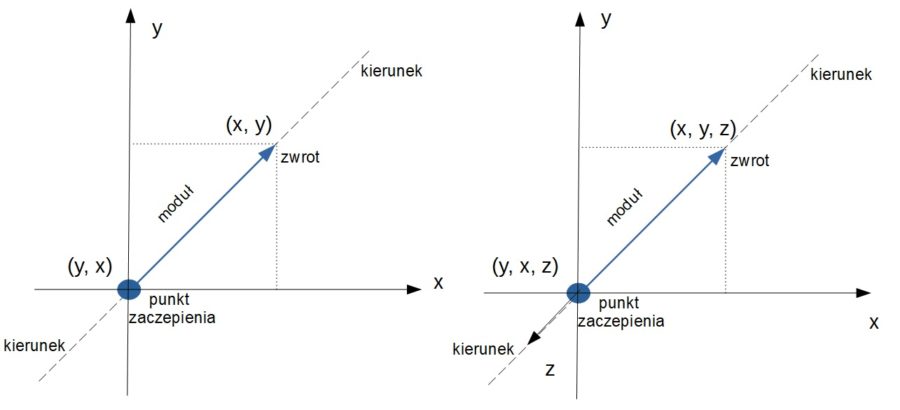
Współrzędne wektora otrzymujemy poprzez odjęcie współrzędnych końca wektora od współrzędnych początku tego wektora. Współrzędne początku wektora w przestrzeni (2=XP, 1=YP, 3=ZP) oraz współrzędne końca wektora (4=Xk, 5=Yk, 6=Zk). Biorą pod uwagę te współrzędne mamy następujący wektor (2,4,3) wynika to stąd że (4-2= 2, 5-1= 4, 6-3= 3) leżący w przestrzeni XYZ.
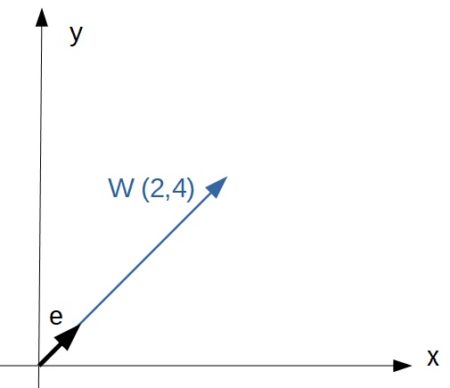
Na płaszczyźnie XY współrzędne wektora przedstawiają się następująco. Współrzędne początku wektora w przestrzeni (2=XP, 1=YP) oraz współrzędne końca wektora (4=Xk, 5=Yk), co daje nam wektor wynika to stąd że (4-2= 2, 5-1= 4).
Równość wektorów
Ile wektorów może znajdować się na płaszczyźnie?
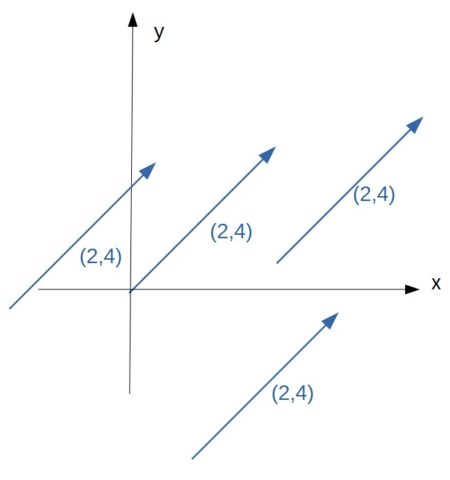
Wektorów na płaszczyźnie jest nieskończenie wiele, gdyż wektor ten powstał przez różnicę współrzędnych końca oraz początku, a tych kombinacji jest nieskończenie wiele. Muszą być zachowane dwa warunki, a mianowicie zachowanie nachylenia do osi X czy Y oraz zachowanie długości. Różnić się mogą jedynie punktem zaczepienia.
Wektory przeciwne
Dwa wektory są do siebie przeciwne jeśli wykazują następujące cechy. Są do siebie równoległe, mają takie same długości oraz mają przeciwne zwroty. Suma takich wektorów równa jest zero, co tworzy nam wektor zerowy, który jest opisany w kolejnym akapicie.
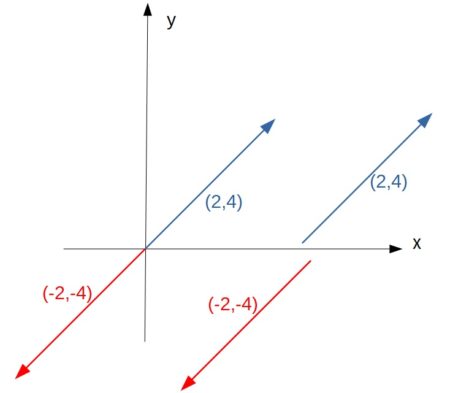
Wektory na rysunku powyżej, które zaczepione są w miejscu (0, 0) w układzie współrzędnych są przykładem sił (wektorów sił) pozostających w równowadze i o takich siłach mówimy, że się równoważą.
Wektor zerowy
Wektor zerowy, to nie jest zero. Liczba zero to tylko jedna liczba, natomiast wektor zerowy opisuje np. prędkość, która jest opisana współrzędnymi (0,0) w przypadku płaszczyzny lub (0,0,0) w przypadku przestrzeni. Biorąc pod uwagę samochód i jego zerowy wektor prędkości stwierdzamy, że samochód ten się nie porusza.
Wektor zerowy jest bardzo pomocny przy oznaczeniu, że jakiś samochód się nie porusza, że jakaś siła nie obciąża jakiejś na belki lub że jakiś przedmiot nie posiada przyspieszenia. Podsumowując wektor zerowy służy do stwierdzenia, że jakaś wielkość lub zależność nie zachodzi.
Wektor zerowy na płaszczyźnie.
Wektor zerowy w przestrzeni.
Wektor jednostkowy
Jest to wektor o module (długości) wynoszącym jeden. Najczęściej oznaczany jest jako lub
i wykorzystywany jest jako narzędzie do wskazywania kierunku, ponieważ zawiera w sobie wszystkie niezbędnie dane do określenia go mianem wektora ale jego wartość (moduł, długość) wynosi zawsze jeden, to znaczy że informacja o wartości zostaje pominięta. To stwarza nam zależność, która mówi że dowolny wektor
jest równy wektorowi jednostkowemu skierowanemu zgonie z wektorem
pomnożonym przez jego wartość (moduł).
Skalary i wektory w statyce
Z każdym kolejnym zaliczonym semestrem na studiach zdadzą sobie Państwo sprawę, że skalary i wektory są pojęciami, które wykorzystujemy już od pierwszych zajęć z mechaniki ogólnej, poprzez wytrzymałość materiałów, mechanikę budowli aż po przedmioty konstrukcyjne jak konstrukcje stalowe czy żelbetowe, dlatego dobrze zdawać sobie sprawę co to jest siła, a co to gęstość oraz jakimi właściwościami się one charakteryzują oraz jakimi się od siebie różnią.
