Płaski układ sił zbieżnych
Spis treści
Układ sił, których linie działania przecinają się w jednym punkcie nazywamy zbieżnym układem sił. Układ taki może występować na płaszczyźnie (płaski układ sił), jak i w przestrzeni (przestrzenny układ sił). Płaski układ sił zbieżnych to najkorzystniejszy układ jaki może się trafić w projektach.
Płaski układ sił zbieżnych
O wiele łatwiej jest nam rozpatrywać jedną siłą wypadkową stworzoną z kilku pojedynczych, aniżeli uwzględniać w obliczeniach za każdym razem kilka sił działających na pewien układ, właśnie dlatego tematyka układów sił jest bardzo ważnym elementem układanki o nazwie statyka. Wychodzę z założenia, że jeden obrazek mówi więcej niż tysiąc słów porównajmy mnogość sił w płaskim układzie do znalezionej wypadkowej tegoż układu sił.
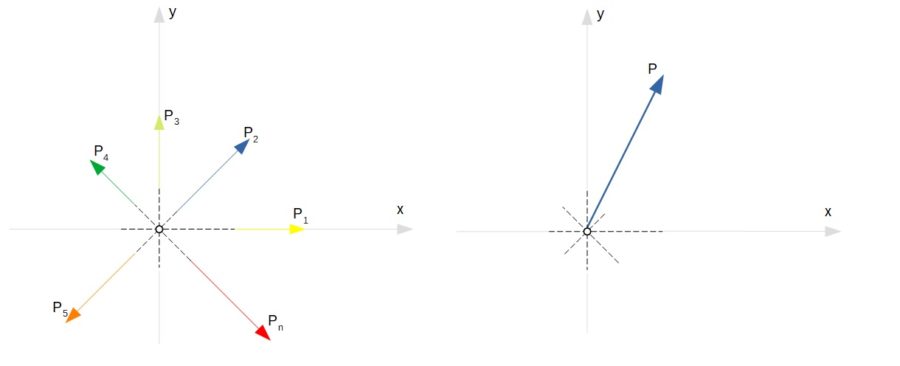
Na podstawie powyższego obrazka z łatwością można stwierdzić, że przeprowadzanie obliczeń jest po stokroć łatwiejsze uwzględniając jedną siłę wypadkową powstałą z układu sił przedstawionego po lewej stronie. Nie można zapomnieć o aksjomatach statyki, czyli o zasadach których nie sprawdzamy, a przyjmujemy jako pewniki. Jeden z nich mówi, że wektory sił mogą przesuwać się wzdłuż linii swojego działania, nie zmieniając przy tym swoich wartości. Widzimy przecież, że siły P1, P2 itd. nie przecinają się w dosłownym znaczeniu tego słowa, ponieważ ich początki są odsunięte od punktu przecięcia, ale przesuwając siły możemy doprowadzić do sytuacji, w którym będą się one stykać w punkcie zero.
Wyznaczenie wypadkowej płaskiego układu sił zbieżnych
Przerabiając tematykę wektorów (gdyż siła to nic innego jak wektor siły), ich zasad oraz działań na nich, możemy wyszczególnić dwie możliwości wyznaczenia wypadkowej układu sił. Pierwszy to sposób geometryczny, w którym wykorzystujemy zasadę wieloboku. Drugi polega na obliczeniach matematycznych, dlatego jest to analityczny sposób wyznaczenia wypadkowej układu sił zbieżnych.
Geometryczny sposób wyznaczenia wypadkowej
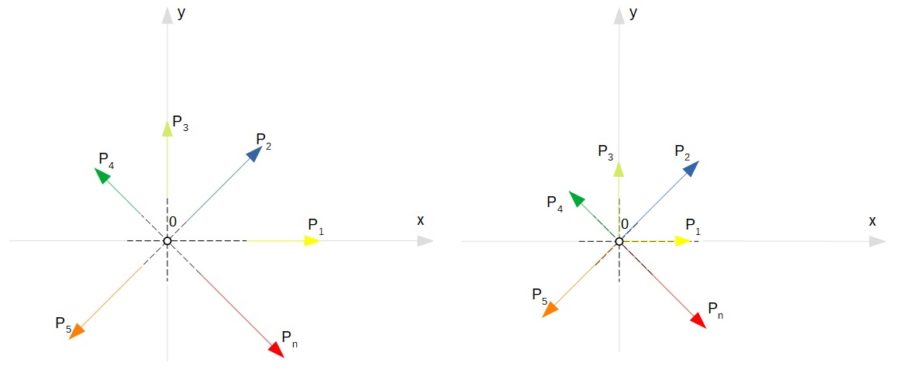
Mamy zbieżny, płaski układ pięciu sił, wypadkowa tegoż układu równa jest ich sumie geometrycznej, a jej linia działania przechodzi przez punkt zero.

Na podstawie powyższego przykładu, możemy stwierdzić, że dowolny płaski układ sił zbieżnych możemy zastąpić jedną siłą wypadkową, która jest równa sumie geometrycznej tych sił i która przyłożona jest również w punkcie zerowym, czyli w punkcie w którym przecinają się siły.
Analityczny sposób wyznaczenia wypadkowej
Analityczny sposób wyznaczenia wypadkowej w płaskim układzie sił zbieżnych korzysta z twierdzenia o rzucie sumy wektorów na oś. Przyjmując układ dwóch wzajemnie prostopadłych osi 0xy, oznaczamy odpowiednio kąty nachylenia sił P1, P2, P3, itd. do osi x odpowiednio jako α1, α2, α3, itd. Wypadkowa tych sił działa wzdłuż prostej l przechodzącej przez punkt 0 i nachylonej do osi x pod kątem α. Wartości wypadkowej, jak i kąta α pod którym działa nie znamy, dlatego naszym zadaniem jest właśnie znalezienie tych danych.
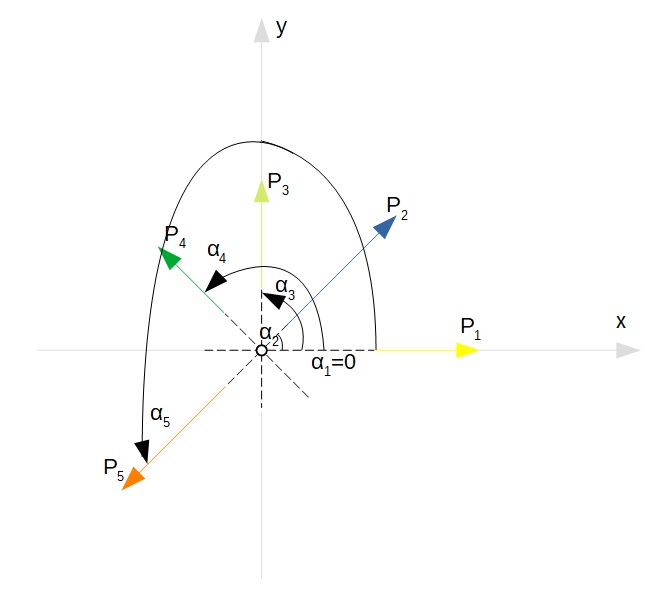
Zaczynamy od wyznaczenia składowych sił. Siły pionowej Py oraz siły poziomej Px. W tym celu korzystamy z zależności trygonometryczny, a dokładnie z sinusa oraz cosinusa.
Składowa pozioma Px.
Składowa pionowa Py.
Teraz mając już dwie składowe siły wypadkowej jesteśmy w stanie znaleźć jej wartość (moduł) oraz kąt działania względem osi x.
