Moment siły względem osi
Moment siły względem osi nazywamy rzut wektora momentu siły względem dowolnego punktu osi na tę oś.
Moduł (wartość) momentu siły \vec{P} względem osi równa się iloczynowi tej siły i jej odległości od osi, pomnożonemu przez sinus kąta zawartego między siłą P a prostą l wektora momentu.
M_{l}=P*h*\sin \alpha
Rzutujemy siłę P na dowolną płaszczyznę zgodnie z poniższa grafiką.
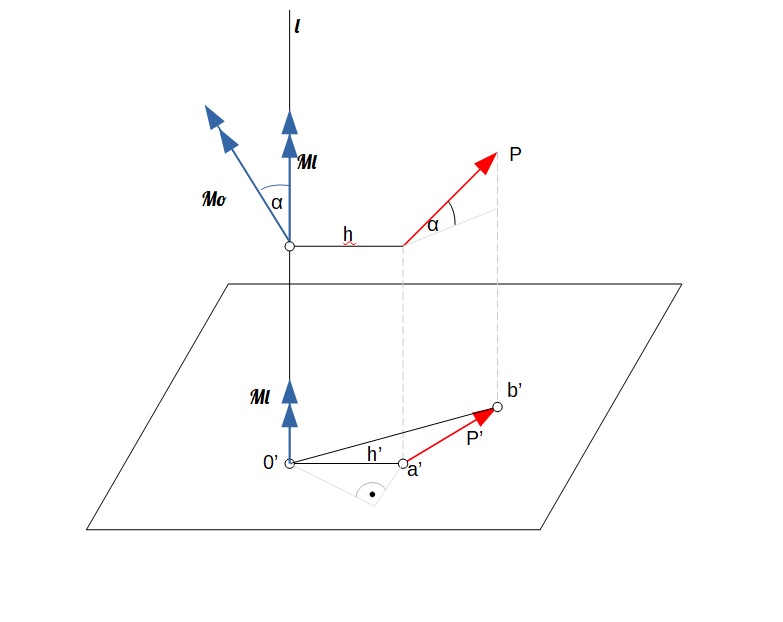
Płaszczyzna ta jest prostopadła do osi l, względem której chcemy otrzymać moment siły P, czyli jest to nic innego jak moment wektora siły P względem punktu {0}'. Między punktami {0}' oraz a' powstaje promień wektora h', więc równanie momentu przedstawia się następująco.

Nie możemy jednakowoż zapomnieć, że wektor siły P' został rzutowany na przyjętą płaszczyznę, to znaczy że musi zachodzić jakaś zależność trygonometryczna między wektorami sił P, a P' i właśnie tak jest.
P'=P*\cos \alphaZależność między momentem siły względem punktu, a względem osi przedstawia się następująco.
M_{l}=M_{0}*\cos \alphaM_{l} – moment siły względem osi
M_{0} – moment siły względem punktu
Moment siły względem osi jest równy zeru w następujących przypadkach.
- wartość siły P = 0
- linia działania siły P przecina się z osią, wtedy h = 0
- siła P działa równolegle do osi
Rozkładając dowolnie skierowaną siłę w przestrzeni na składowe równoległe do trzech osi współrzędnych otrzymamy również składowe momentu M_{0}, które są momentami siły P względem poszczególnych osi x, y oraz z.

Znakowanie momentów siły względem osi odbywa się poprzez porównanie zwrotu momentu ze zwrotem osi. Gdy oba działają w tym samym kierunku, wtedy uważamy że wartość (moduł) jest dodatni.
