Równowaga układu sił zbieżnych
Spis treści
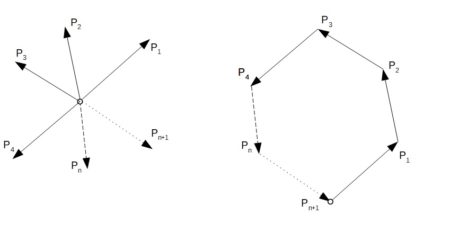
Równowaga układu sił zbieżnych. Poprzez równowagę płaskiego układu sił zbieżnych rozumiemy, że ich suma geometryczna jest równa zeru. Sytuacja taka następuje, podczas gdy zbudowany wielobok z tych sił jest wielobokiem zamkniętym, a cały układ pozostaje w równowadze.
Aby układ pozostał w równowadze muszą zostać spełniona dwa następujące warunki.
Warunek geometryczny, który mówi że układ sił zbieżnych P1, P2, Pn, …, Pn+1 działający na jednej płaszczyźnie pozostaje w równowadze, gdy wielobok utworzony ze wszystkich sił wchodzących do tego zbioru tworzy wielobok zamknięty. Warunkowi temu odpowiada następujące równanie wektorowe.

Warunek analityczny, który mówi że siły zbieżne leżące na jednej płaszczyźnie są w równowadze, jeżeli suma rzutów tych sił na osie układu współrzędnych będą równe. W przypadku płaskiego układu sił zbieżnych rozumiemy dwa rzuty sił na oś pionowa oraz poziomą. Napotykamy tutaj równania równowagi, które w kolejnych kursach będą nagminnie występować podczas obliczania reakcji lub sił wewnętrznych. Przedstawiają się one następująco.
Równowaga trzech sił nierównoległych
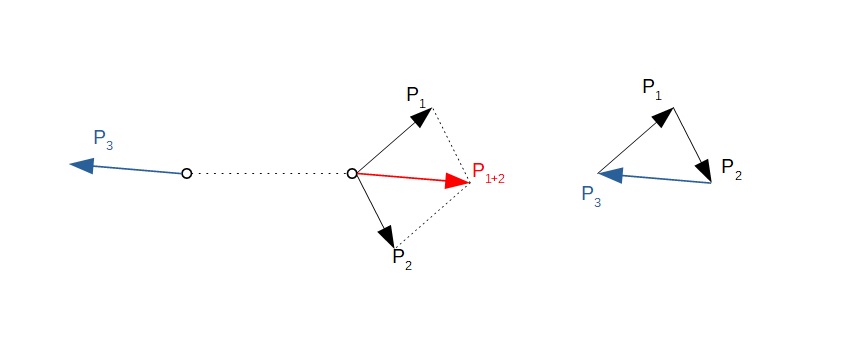
Korzystając z metody trójkąta, możemy ustalić czy układ trzech sił nierównoległych pozostaje w równowadze. Na ciało działa układ trzech sił P1, P2 oraz P3. Wypadkowa dwóch wektorów sił P(1+2) ma identyczny moduł (wartość), jak siła P3 oraz działając wzdłuż jednej prostej l są do siebie przeciwnie skierowane w tym przypadku możemy stwierdzić, że omawiany układ trzech sił pozostaje w równowadze i w ten sposób otrzymujemy twierdzenie dotyczące równowagi trzech sił.
Trzy nierównoległe siły na płaszczyźnie pozostają w równowadze tylko w przypadku, gdy utworzony z nich trójkąt będzie zamknięty, a linie ich działania przecinają się w jednym punkcie.
Równowaga przestrzennego układu sił zbieżnych

W materiale o przestrzennych układach sił zbieżnych padło stwierdzenie, które mówi że dowolną liczbę sił tworzących przestrzenne układy zbieżne możemy zastąpić jedną siłą wypadkową równą geometrycznej sumie tych sił. W przypadku gdy układ ten pozostaje w równowadze jego wypadkowa musi równać się zero. Wielobok sił powstały z połączenia wektorów sił tegoż układu musi być zamknięty, dokładnie tak samo jak w przypadków równowagi płaskiego układu sił. Wektor siły wypadkowej powstałej z układu pozostającego w równowadze wyraża się równaniem.
W przypadku sposobu analitycznego, układ pozostanie w równowadze gdy składowe wypadkowej siły, czyli rzutu wektorów sił na trzy poszczególne osie współrzędnych dadzą nam w każdym z trzech równań równowagi wynik zerowy. Przedstawia się to następująco.
