Redukcja przestrzennego układu sił do skrętnika
Spis treści
Redukcja układu do skrętnika. Redukcja przestrzennego układu sił do skrętnika jest tematem, który występuję bardzo rzadko na korepetycjach lub podczas wspólnego rozwiązywania projektów, ale w celu pokazania jakie są możliwości redukcji układów temat ten również pokrótce zahaczymy.
W poprzednich poradnikach redukowaliśmy układ do wektora głównego oraz momentu głównego, a układ ten można jeszcze bardziej uprościć. Uproszczenie takie nazywa się skrętnikiem i ma zastosowanie wtedy, gdy zredukowany układ wektora głównego i momentu głównego leżą na jednej linii działania.
Układ trzech sił
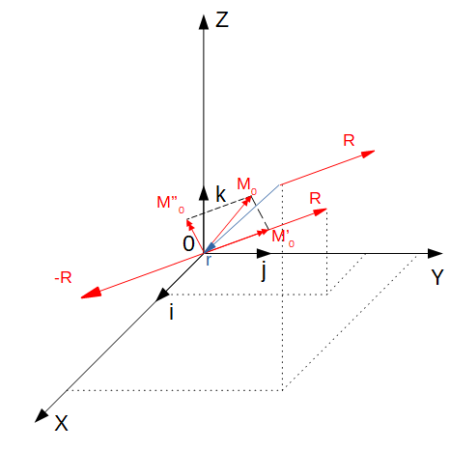
Na powyższym układzie sił przestrzennych wektor główny i moment główny zostały zredukowane względem punktu 0, który jest środkiem redukcji.
Aby sprowadzić je do jeszcze prostszej postaci, czyli skrętnika rozkładamy moment główny M0 na dwie składowe M0’ – zgodną z kierunkiem wektora głównego R oraz M0” – prostopadłą do tego wektora. Następnie składową M0” zastępujemy parą sił (R, -R), która leży w płaszczyźnie prostopadłej do M0”, przy czym siła -R, przyłożona jest w punkcie 0, a druga siła R oddalona jest od punktu 0 o wektor r.
W wyniku tych przekształceń otrzymaliśmy dwie siły (R i -R), przyłożone w punkcie 0, które oczywiście usuwamy, ponieważ wzajemnie się równoważą. Podsumowując cały układ redukuje się do jednej siły R, która oddalona jest o promień wektora r oraz do momentu głównego M0’ równoległej do siły R. Wektor M0’ jest swobodny, a co za tym idzie można go przenieść do punktu, w którym leży siła R.
Wektory kolinearne

Powyższy wywód udowadnia, że dowolny przestrzenny układ sił można zredukować do dwóch wektorów kolinearnych, który nazywa się skrętnikiem, a ich linia działania nazywa się osią centralną układu.
Załóżmy, że mamy układ sił przestrzennych, który wygląda następująco. W jego skład schodzą trzy siły oraz skupione o wartościach wyrażonych w niutonach.

Ich punkty zaczepienia określone są wektorami wyrażonymi w metrach.
r_{1}=2k\; \; ;\; \; r_{2}=3i\; \; ;\; \; r_{3}=3jObliczamy wektor główny oraz moment główny układu sił względem środka redukcji, to jest początku układu współrzędnych.
R=\sum P_{i}=iR_{x}+jR_{y}+kR_{z}=4i+2j+4k
R=\sqrt{16+4+16}=6,00NM_{0}=\sum M_{i,0}=\sum (r_{i}+P_{i})=iM_{0x}+jM_{0y}+kM_{0z}M_{0}=\begin{vmatrix}
i & j & k\\
0 & 0 &2 \\
4 & 0 & 0
\end{vmatrix}+\begin{vmatrix}
i & j & k\\
3 & 0 &0 \\
0 & 2 & 0
\end{vmatrix}+\begin{vmatrix}
i & j & k\\
0 & 3 &2 \\
0 & 0 & 4
\end{vmatrix}=12i+8j+6kM_{0x}=12,00Nm\; \; ;\; \; M_{0y}=8,00Nm\; \; ;\; \; M_{0z}=6,00Nm
Zredukowany został układ przestrzenny trzech sił do jednego wektora głównego o wartości 6 niutonów oraz momentu głównego 15,63 niutonometrów. Obliczmy jeszcze cosinus kąta między wektorami powstałymi z redukcji.
cos\alpha =\frac{R_{x}*M_{0x}+R_{y}*M_{0y}+R_{z}*M_{0z}}{R*M_{0}}=\frac{4*12+2*8+4*6}{6*15,62}=0,9389Układ trzech sił zredukował się do wektora głównego oraz momentu głównego, dalsza redukcja oznacza dalsze uproszczenie układu tych sił do skrętnika względem innego środka redukcji, leżącego na osi centralnej. Równanie tej osi wyznaczamy na podstawie poniższego wzoru.
\frac{12-4y+2z}{4}=\frac{8+4x-4z}{2}=\frac{6-2x+4y}{4}Z powyższego działania otrzymujemy dwa niezależne równania.
2x+y-2,5z-3=0
2x-y-2z+2,5=0
Następnie w celu narysowania osi centralnej należy znaleźć współrzędne punktów przecięcia tej prostej z płaszczyznami 0yz oraz 0xz układu współrzędnych.
Dla x = 0,00
y-2,5z-3=0
-y-2z+2,5=0
Co daje następujące współrzędne y1 = 3,227m oraz z1 = -0,111m.
Natomiast dla y = 0
2x-2,5z-3=0
2x-2z+2,5=0
Co daje następujące współrzędne x2 = -12,25m oraz z2 = -11,00m. Oś centralna jest prostą przechodzącą przez punktu A (0,00 ; 3,277 ; -0,111) oraz B (-12,25 ; 0,00 ; -11,00). Na tej prostej leży punkt, który jest początkiem naszego skrętnika. Skrętnik jest układem złożonym z wektorów kolinearnych, którymi są wektor główny.
Wektor główny
R=4i+2j+4k\;\;\;;\;\;\;R=6,00N
Oraz składowa wektora głównego M0’.
M'_{0}=M_{0}*cos\alpha \frac{R}{R}=15,62*0,9389*\frac{4i+2j+4k}{6}M'_{0}=9,77i+4,88j+9,77kSkrętnik
M'_{0}=\sqrt{(9,77)^2*(4,88)^2+(9,77)^2}=14,56Nm