Redukcja płaskiego układu sił
Spis treści
Redukcja płaskiego układu sił. Poprzez płaski układ sił rozumiemy zbiór poszczególnych sił działających na płaszczyźnie dwuwymiarowej 0xy.
Poprzedni materiał opisuje temat równoległego przesunięcia siły i można powiedzieć, że redukcja płaskiego układu sił jest analogicznym poradnikiem który po prostu musi znaleźć się zaraz po nim aby zachować logiczną kolejność nauki. Przypomnę, że omówiliśmy już jeden typ układów sił, a mowa tutaj o układzie sił zbieżnych, czyli przecinających się w jednym punkcie. Teraz omówimy układy sił, które można określić jako posiadające dowolnie rozłożone siły na płaszczyźnie, a więc ich linie działania nie przecinają się w jednym punkcie.

Redukcja płaskiego układu sił
Dowolną liczbę sił, która wchodzi w skład rozpatrywanego układu sił na płaszczyźnie można zredukować do jednej siły i jednej pary sił, którą można zastąpić jej momentem właśnie poprzez równoległe przesunięcie wszystkich sił do wybranego punktu 0.

Powstałe po redukcji układu płaskiego siły nazywamy wektorem głównym \vec{R} oraz momentem głównym M_{0} układu.
Wektor główny
Wektor główny \vec{R} otrzymujemy z sumy geometrycznej wszystkich sił.

Rozkładamy poszczególne siły skupione na składowe poziomą x oraz pionową y. Suma geometryczna składowych \vec{R_{x}} i \vec{R_{y}} daje nam szukaną wypadkową czyli szukany wektor główny \vec{R}. Wykorzystując powyższą zależności jesteśmy w stanie wyznaczyć wartość wektora głównego oraz kąt, jaki wektor ten tworzy z osia 0x.
Nie możemy jednak zapomnieć, że przy równoległym przesunięciu siły powstanie nam również para sił, którą możemy zamieć na moment główny.
Moment główny
Moment główny M_{0} powstaje z sumy momentów względem tego punktu 0, do którego przesuwaliśmy siły.
Pamiętając jednocześnie, że poszczególne siły skupione Pi zostały rozłożone na dwie składowe, dlatego też sam wektor kierunkowy jest sumą składowych x i y.
\vec{r_{i}}=\vec{r_{i,x}}+\vec{r_{i,y}}Ostatecznie otrzymamy warunek, który mówi nam, że wektor momentu głównego jest prostopadły do płaszczyzny 0xy, a co za tym idzie jest również prostopadły do wektora głównego \vec{R}.
Koniec końców nasz układ sił przeistoczy się z chaotycznego w schludny układ siły wypadkowej złożony jedynie z wektora głównego i momentu głównego.
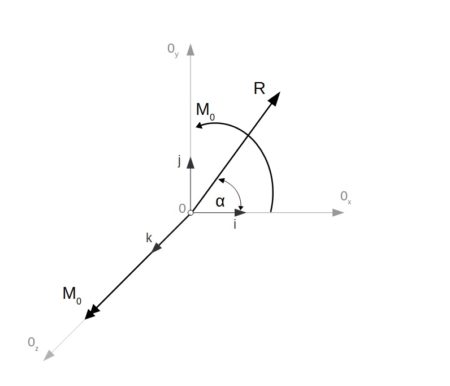
Na schemacie widać moment główny M0 oraz jego wektor M0, przy czym proszę błędnie nie zakładać, że na schemacie widnieją dwa momenty.
Już teraz zapraszam do kolejnego materiału, w którym omówiono sposób redukcji płaskiego układu sił tylko do jednej siły wypadkowej.
