Zasada superpozycji
Spis treści
Często podczas korepetycji, szczególnie przy rysowaniu wykresów sił wewnętrznych z pamięci powstaje problem gdy należy uwzględnić działanie więcej niż jednej siły przyłożonej do schematu. Tutaj z pomocą przychodzi nam zasada superpozycji.
Zasada superpozycji
Zasada superpozycji mówi że siły pochodzące od kilku źródeł są wektorową sumą tych sił, tłumacząc po ludzku jest to zasada łącząca skutki działania kilku sił na jednym schemacie. Najprawdopodobniej napotkacie i będziecie korzystać z tej zasady podczas obliczania sił wewnętrznych w układach statycznie niewyznaczalnych czy to metodą sił czy przemieszczeń. Może ona również okazać się pomocna podczas rysowania wykresów sił wewnętrznych z pamięci. Zasadę superpozycji, czyli łączenia skutków najprościej określić następującym równaniem.
Przykład zasady superpozycji
Załóżmy że mamy zadanie narysować wykresy momentów zginających od zadanych obciążeń. Żeby nie utrudniać przyjmiemy najprostszą belkę wspornikową.
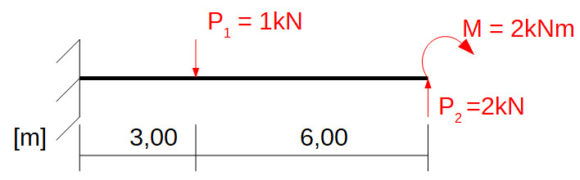
Zadanie to nie powinno przysparzać nam większych problemów na etapie mechaniki budowli. Chcąc narysować szybko wykres momentów zginających najłatwiej narysować sobie trzy osobne wykresy momentów zginających od poszczególnych sił M, P1 oraz P2.
Dlaczego? Choćby dlatego, że końcowy wykres momentów zginających wygląda tak.

Nic skomplikowanego, jeśli możemy przeprowadzić obliczenia dla poszczególnych przekrojów. Co w przypadku jeśli na kolokwium nie ma zbyt wiele czasu na przeprowadzenie obliczeń, a zadany schemat statyczny jest o wiele bardziej skomplikowany? Tutaj właśnie dochodzimy do sedna. Narysowanie wykresów momentów zginających od poszczególnych obciążeń bardzo ułatwia nam zadanie, a przypadku obliczania układów statycznie niewyznaczalnych dopiero ta zasada umożliwia utworzenie końcowego wykresu.
Rozdzielenie działania obciążenia utworzy nam trzy następujące wykresy momentów.
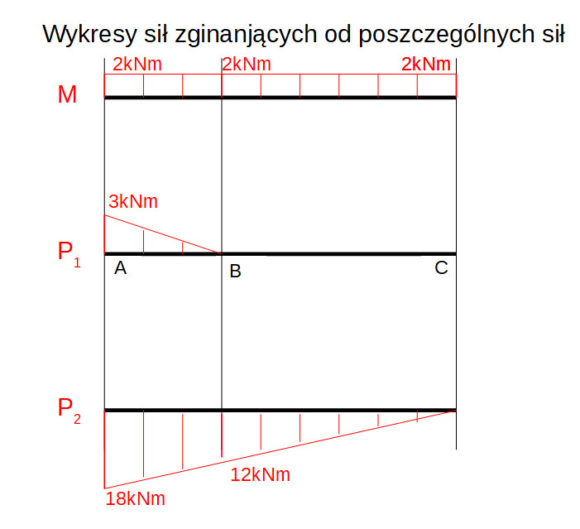
I teraz wystarczy połączyć wszystkie trzy wykresy w jeden, który już został przedstawiony. Bardzo łatwo można to zrobić w pamięci, ale ja tutaj przedstawie jeszcze obliczenia dla punktów A, B oraz C.
Ogólny wzór.

Widzimy, że zasada superpozycji jest super przydatna co obrazuje nam ten poradnik i naprawdę zachęcam do używania jej podczas własnych obliczeń. Tworzy ona nam dodatkowe wykresy do narysowania i obliczenia, ale może ustrzec przed niepotrzebnymi błędami.

Prosto, szybko przejrzyście… więcej takich materiałów!!
🙂