Metoda przemieszczeń – algorytm + przykład
Spis treści
Metoda przemieszczeń przykład i algorytm obliczania. Mam nadzieję, że przeczytałeś/aś poradnik metoda przemieszczeń – wstęp. Metoda przemieszczeń przykład, poradników z tą metodą nie będę rozdzielał na algorytm oraz przykład, co pozwoli mi łatwiej przedstawić mechanizm działania metody przemieszczeń oraz teorię dotyczącą metody przemieszczeń.
Metoda przemieszczeń przykład
Zadanie.
Sporządzić wykresy sił wewnętrznych schematu statycznie niewyznaczalnego metodą przemieszczeń, mając dane i schemat widniejący poniżej.
Układ rzeczywisty

Dane:






SKN
Wyznaczenie stopnia kinematycznej niewyznaczalności układu (SKN)∑φ – łączna liczba nieznanych obrotów węzłów sztywnych(liczba węzłów sztywnych). W tym przykładzie ∑φ = 1, a jest to węzeł „3”.
Węzeł sztywny łączny minimum dwa pręty statycznie niewyznaczalne.
∑ψ – łączna liczba nieznanych, niezależnych przesuwów węzłów sztywnych, równych stopniu kinematycznej zmienności układu przegubowego.
Układ przegubowy

Układ jest dwukrotnie kinematycznie niewyznaczalny, nieznany jest obrót węzła 3 – φ3 = Z1 oraz nieznany jest przesuw węzła 3 – ψ3 = Z2
Układ podstawowy
Układ podstawowy i równanie kanoniczne.
Układ podstawowy musi być kinematycznie wyznaczalny, tzn. muszą być znane obroty i przesunięcia wszystkich węzłów sztywnych. Tworzymy go, dodając na kierunkach nieznanych obrotów więzi fikcyjne.
1 – blokowanie obrotu,
2 – blokowanie przesuwu. Założenie:
Założenie:– czyli pomijamy zmiany na długości. Pisałem o tym we wstępie do metody przemieszczeń.
Równanie kanoniczne. – reakcja od uogólnionego przemieszczenia więzi;
– reakcja od oddziaływania zewnętrznego(siła, temperatura, osiadanie);
Obliczenie reakcji
Obliczenie reakcji „kij” w więziach fikcyjnych.
a) Stan odkształceń – momenty przywęzłowe(na końcach wyciętych prętów) ze wzorów transformacyjnych.
 b) Stan odkształceń Z2 = ψ3 = 1 – obliczenia kątów obrotu cięciw z równań łańcucha kinematycznego i zależności trygonometrycznych.
b) Stan odkształceń Z2 = ψ3 = 1 – obliczenia kątów obrotu cięciw z równań łańcucha kinematycznego i zależności trygonometrycznych.

Vk i Uk – przemieszczenie poziome i pionowe końcowego węzła łańcucha, wielkości te muszą być znane!
Vo i Uo – przemieszczenia poziome i pionowe początkowego węzła łańcucha, wielkości te muszą być znane!
Łańcuch kinematyczny
Aby ułożyć poprawny łańcuch kinematyczny należy rozumieć co dwa powyższe wzory znaczą oraz z czego się składają. Zacznijmy od strony lewej.
Jest to suma wszystkich przemieszczeń prętów mnożonych przez długość danego pręta, które znajdują się w granicach przyjętego łańcucha kinematycznego. Dla łańcucha kinematycznego 1-2-3-4 uwzględniamy trzy pręty.
Prawa strona.
Tutaj sprawa jest o wiele prostsza, ponieważ muszą być to znane przemieszczenia w węźle końcowym i początkowym przyjętego łańcuch kinematycznego. Czyli w miejsce tych symboli może pojawić jedynie zero lub jedynka.
Jak więc układać takie łańcuchy kinematyczne? Na co zwracać uwagę?
Najważniejszym elementem jest dobór takiego węzła początkowego i końcowego, który nie ulega przemieszczeniu lub ulega przemieszczeniu, które sami zadaliśmy i je znamy, więc jest to jeden.
Dodatkowo należy tak układać łańcuch, aby nie było za dużo niewiadomych po stronie lewej, a najlepiej aby było tylko jedno niewiadome, szukane .
Wróćmy do zadania. Na przyjętym przykładzie pokażę, jak używać łańcucha kinematycznego.
Łańcuch 1 – 2 – 3 – 4(cała rama)
po X:
po X:
po X: – dwie niewiadome.
po Y:
po Y:
po Y: – ponownie dwie niewiadome.
Ułóżmy inny łańcuch kinematyczny, tak byśmy mogli obliczyć jakiekolwiek przemieszczenie ψ.
Łańcuch 1 – 2
Jak widzimy długość łańcucha nie jest ważna, ważne jest abyśmy znali przemieszczenia węzłów na początku i końcu przyjętego łańcucha.
Po X:
Po X:
Po X: – znamy pierwsze przemieszczenie
Tutaj jeszcze szybkie wtrącenie. Proszę zauważyć, że w takiej sytuacji możemy skorzystać po prostu z funkcji trygonometrycznych, ponieważ powstaje nam tutaj trójkąt o wysokości 4,00 m i podstawie 1,00 m. Co daje nam taki sam wynik.
Teraz wracając do łańcucha kinematycznego 1-2-3-4 i podstawiając pod wartość obliczonego przemieszczenia, jesteśmy w stanie poznać dwa pozostałe.
po X:
po X:
po X:
po Y:
po Y:
po Y:
Znamy już wszystkie przemieszczenia, ich wartości prezentują się następująco.
Teraz korzystając ze wzorów transformacyjnych obliczamy momenty przywęzłowe na końcach wyciętych prętów.
c) Momenty przywęzłowe na końcach wyciętych prętów ze wzoru transformacyjnego

d) Reakcja k11
e) Reakcja K12 = K21
K12 = K21 – z warunku równowagi wyciętego węzła „3” obciążonego momentami przywęzłowymi.
f) Reakcja K22
K22 – zakładamy, że reakcja k22 musi wyjść dodatnia.

Równanie pracy wirtualnej:
Obliczenie reakcji „kip” w więziach fikcyjnych.
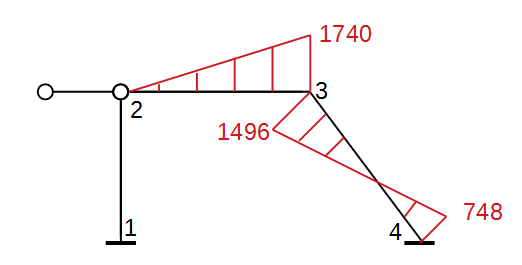
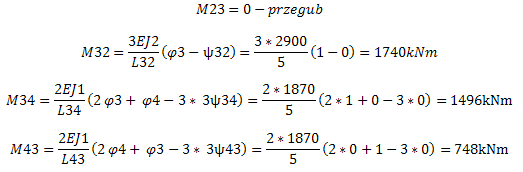
a) Stan P – momenty przywęzłowe(na końcach wyciętych prętów).
(pręty nie obciążone)
(przegub)
b) Reakcja K1p
K1p – z warunku równowagi wyciętego węzła „3” obciążonego momentami przywęzłowymi z wykresu Mp oraz momentem zewnętrznym przyłożonym w tym węźle
c) Reakcja K2p
Obliczamy jak K22, uwzględniając pracę sił skupionych zewnętrznych przyłożonych w węzłach.
Łańcuch kinematyczny
Pamiętajmy, że praca obciążenia ciągłego jest równa pracy siły wypadkowej Q!
Równanie pracy wirtualnej:
Uklad równań kanonicznych
Rozwiązanie układu równań kanonicznych.
Obliczenie rzeczywistych przemieszczeń węzła „3”. – obrót
– przesuw
Wykresy sił wewnętrznych
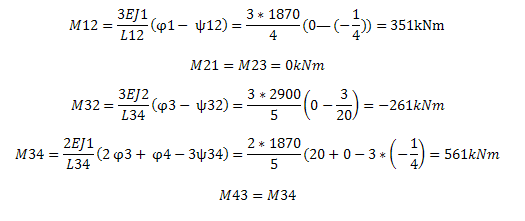
Wykres momentów zginających w układzie rzeczywistym ze wzoru superpozycji.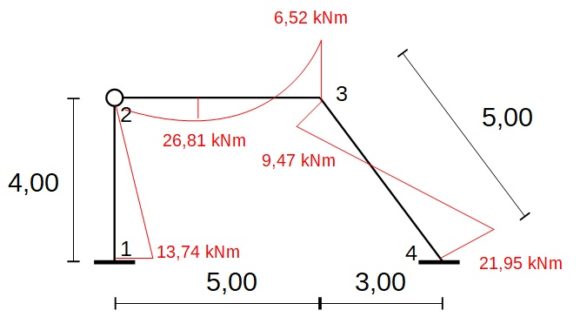
Wykres sił poprzecznych(tnących) z warunków równowagi wyciętych prętów, obciążonych na końcach momentami z wykresu „M” i obciążeniem przęsłowym.
Wycinamy poszczególne pręty i obliczamy siły tnące.
Wykres sił normalnych(osiowych) z warunków równowagi wyciętych węzłów obciążonymi siłami z wykresu „T” oraz siłami skupionymi zewnętrznymi przyłożonymi w tych węzłach.
Mając siły tnące wycinamy węzły i obliczamy siły normalne.
Uwaga! Ze względu na przejrzystość poradnika pozostałe punkty zostały opisane w osobnym poradniku, poniżej znajduje się jedynie przedstawiony algorytm.
Sprawdzenie kinematyczne
Sprawdzenie statyczne
Sprawdzenie komputerowe
Oczywiście sprawdzenie komputerowe jest najefektywniejszym ze sposobów i najszybsze.
To byłoby na tyle. Mam nadzieję, że powyższy przykład pomoże zrozumieć Państwu na czym polega metoda przemieszczeń. Tak jak napisałem wcześniej, metoda przemieszczeń jest na oko dwa razy trudniejsza, niż metoda sił, którą opisałem we wcześniejszych poradnikach, dlatego również potrzeba dwa razy więcej przerobionych przykładów, aby dobrze nauczyć się tej metody.

1 Odpowiedź
[…] Na tym zakończę wstęp do metody przemieszczeń. W celu kontynuowania nauki, zapraszam do poradnika o nazwie metoda przemieszczeń – algorytm + przykład. […]